Optimal Drug Scheduling for Cancer Chemotherapy
Dynamic optimization of bioprocesses: efficient and robust numerical strategies 2003, Julio R. Banga, Eva Balsa-Cantro, Carmen G. Moles and Antonio A. Alonso
Case Study III: Optimal Drug Scheduling for Cancer Chemotherapy
Contents
Problem description
Many researches have devoted their efforts to determine whether current methods for drugs administration during cancer chemotherapy are optimal, and if alternative regimens should be considered. Martin (1992) considered the interesting problem of determining the optimal cancer drug scheduling to decrease the size of a malignant tumor as measured at some particular time in the future. The drug concentration must be kept below some level throughout the treatment period and the cumulative (toxic) effect of the drug must be kept below the ultimate tolerance level. Bojkov et al. (1993) and Luus et al. (1995) also studied this problem using direct search optimization. More recently, Carrasco and Banga (1997) have applied stochastic techniques to solve this problem, obtaining better results (Carrasco & Banga 1998). The mathematical statement of this dynamic optimization problem is: Find u(t) over t in [t0; tf ] to maximize:

subject to:


where the tumor mass is given by N = 10^12 * exp (-x1) cells, x2 is the drug concentration in the body in drug units [D] and x3 is the cumulative effect of the drug. The parameters are taken as k1 = 9.9e-4 days, k2 = 8.4e-3 days-1 [De-1], k3 = 10 [De-1], and k4 = 0.27 days-1. The initial state considered is:
![$$ x(t_0) = [log(100) \ 0 \ 0]' $$](xdrugScheduling_eq78937.png)
where,
H(x2-k3) = 1 if x2 >= k3 or 0 if x2 < k3
and the final time tf = 84 days. The optimization is subject to the following constraints on the drug delivery (control variable):

There are the following path constraints on the state variables:


Also, there should be at least a 50% reduction in the size of the tumor every three weeks, so that the following point constraints must be considered:



State number 3 is converted to an integral constraints in the formulation.
% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t nn = [20 40 120]; for i = 1:length(nn)
n = nn(i);
p = tomPhase('p', t, 0, 84, n);
setPhase(p);
tomStates x1 x2
tomControls u
% Initial guess
if i==1
x0 = {icollocate(x2 == 10)
collocate(u == 20)};
else
x0 = {icollocate({x1 == x1opt; x2 == x2opt})
collocate(u == uopt)};
end
% Box constraints
cbox = {
0 <= mcollocate(x1)
0 <= mcollocate(x2) <= 50
0 <= collocate(u) <= 80};
% Boundary constraints
cbnd = initial({x1 == log(100); x2 == 0});
% ODEs and path constraints
k1 = 9.9e-4; k2 = 8.4e-3;
k3 = 10; k4 = 0.27;
ceq = {collocate({
dot(x1) == -k1*x1+k2*max(x2-k3,0)
dot(x2) == u-k4*x2})
% Point-wise conditions
atPoints([21;42;63],x1) >= log([200;400;800])
% Integral constr.
integrate(x2) == 2.1e3};
% Objective
objective = -final(x1);
Solve the problem
options = struct;
options.name = 'Drug Scheduling';
options.solver = 'multiMin';
options.xInit = 130-n;
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
x1opt = subs(x1, solution);
x2opt = subs(x2, solution);
uopt = subs(u, solution);
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Drug Scheduling f_k -16.921534390056696000
sum(|constr|) 0.000000000000745242
f(x_k) + sum(|constr|) -16.921534390055950000
f(x_0) -171.672308625670670000
Solver: multiMin with local solver snopt. EXIT=0. INFORM=1.
Find local optima using multistart local search
Did 110 local tries. Found 79 local minima
FuncEv 1 ConstrEv 21 ConJacEv 20 Iter 10 MinorIter 246
CPU time: 4.828125 sec. Elapsed time: 4.922000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Drug Scheduling f_k -17.267425658711193000
sum(|constr|) 0.000000000001426355
f(x_k) + sum(|constr|) -17.267425658709769000
f(x_0) 369.788912036584410000
Solver: multiMin with local solver snopt. EXIT=0. INFORM=1.
Find local optima using multistart local search
Did 90 local tries. Found 88 local minima
FuncEv 1 ConstrEv 39 ConJacEv 38 Iter 19 MinorIter 802
CPU time: 12.406250 sec. Elapsed time: 12.485000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Drug Scheduling f_k -17.407146220453011000
sum(|constr|) 0.000000000017067115
f(x_k) + sum(|constr|) -17.407146220435944000
f(x_0) -17.267425658711261000
Solver: multiMin with local solver snopt. EXIT=0. INFORM=1.
Find local optima using multistart local search
Did 10 local tries. Found 9 local minima
FuncEv 1 ConstrEv 69 ConJacEv 68 Iter 25 MinorIter 777
CPU time: 31.593750 sec. Elapsed time: 31.765000 sec.
end
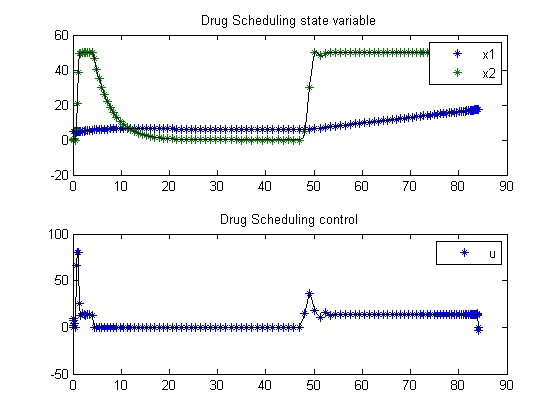
Plot result
subplot(2,1,1) ezplot([x1;x2]); legend('x1','x2'); title('Drug Scheduling state variable'); subplot(2,1,2) ezplot(u); legend('u'); title('Drug Scheduling control');