MK2 5-Link robot
Singular time-optimal of the MK2 5-Link robot. Implementation without mass matrix inversion.
Contents
Problem description
The dynamic model of the MK2 robot was generated automatically by AUTOLEV that produces Fortran 77 code: http://www.autolev.com/
The transfer to matlab code was performed partly automatically using
1) to_f90: http://users.bigpond.net.au/amiller/ 2) f2matlab.m: http://www.mathworks.com/matlabcentral/fileexchange/5260
Programmer: Gerard Van Willigenburg (Wageningen University)
% Copyright (c) 2009-2009 by Tomlab Optimization Inc.
Problem setup
toms t tf % Free final time p = tomPhase('p', t, 0, tf, 20); setPhase(p); global AP4AD AP4AD = true; % Work-around to get more efficient code for this particular case. % Dimension state and control vector np = 5; nx = 2*np; nu = np; % Define the state and control vector tomStates a1 a2 a3 a4 a5 w1 w2 w3 w4 w5 alpha = [a1; a2; a3; a4; a5]; omega = [w1; w2; w3; w4; w5]; tomControls u1 u2 u3 u4 u5 u = [u1; u2; u3; u4; u5]; % Initial and terminal states znp = zeros(np,1); alphaf = [0.975; 0.975; 0; 0; 0.975]; % Maximum values controls umax = [15; 10; 5; 5; 5]; % Initial guess x0 = {tf==0.8; icollocate({alpha == alphaf; omega == znp}) collocate({u == 0})}; % Box constraints cbox = {0.7 <= tf <= 0.9; collocate({-umax <= u <= umax})}; % Boundary constraints cbnd = {initial({alpha == znp; omega == znp}) final({alpha == alphaf; omega == znp})}; % Compute mass matrix [mass, rhs] = fiveLinkMK2Robotdyn([alpha; omega], u); % Equality differential equation constraints ceq = collocate({dot(alpha) == omega; mass*dot(omega) == rhs}); % Objective objective = tf;
Solve the problem
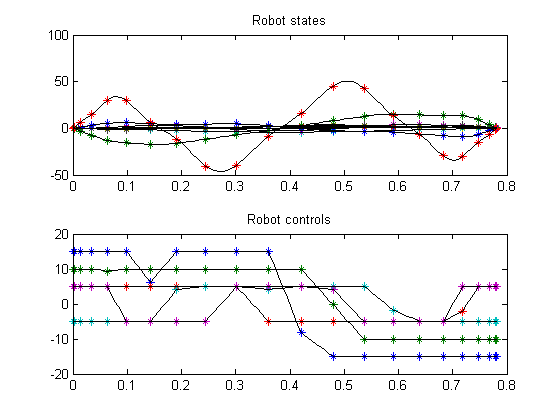
options = struct; options.use_d2c = 0; options.use_H = 0; options.type = 'lpcon'; options.name = 'Five Link MK2 Robot'; options.derivatives = 'automatic'; solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options); % Plot intermediate result subplot(2,1,1); ezplot([alpha; omega]); title('Robot states'); subplot(2,1,2); ezplot(u); title('Robot controls'); clear AP4AD
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Five Link MK2 Robot f_k 0.781121378222925930
sum(|constr|) 0.000037255049196879
f(x_k) + sum(|constr|) 0.781158633272122760
f(x_0) 0.800000000000000040
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
MAD TB Automatic Differentiation estimating: gradient and constraint gradient
FuncEv 1 ConstrEv 398 ConJacEv 138 Iter 118 MinorIter 1175
CPU time: 201.031250 sec. Elapsed time: 155.297000 sec.