Food Sterilization
Contents
Problem description
Simplified version of the sterilization problem considered in the paper: Z.S. Chalabi, L.G. van Willigenburg, G. van Straten, 1999, Robust optimal receding horizon control of the thermal sterilization of canned food, Journal of Food Engineering, 40, pp. 207-218.
Programmers: Gerard Van Willigenburg (Wageningen University) Willem De Koning (retired from Delft University of Technology)
% Copyright (c) 2009-2009 by Tomlab Optimization Inc.
Problem setup
% Array with consecutive number of collocation points narr = [20 30 40]; toms t; tf = 1500; % Fixed final time for n=narr
p = tomPhase('p', t, 0, tf, n); setPhase(p) tomStates x1 x2 x3 x4 tomControls u1 % Initial & terminal states xi = [20; 20; 0; 0]; xf = [40; 0; 100; 0]; % Initial guess if n==narr(1) x0 = {icollocate({x1 == xi(1); x2 == xi(2) x3 == xi(3); x4 == xi(4)}) collocate({u1 == 50})}; else x0 = {icollocate({x1 == xopt1; x2 == xopt2 x3 == xopt3; x4 == xopt4}) collocate({u1 == uopt1})}; end % Box constraints cbox = {0 <= collocate(u1) <= 50}; % Boundary constraints cbnd = {initial({x1 == xi(1); x2 == xi(2); x3 == xi(3); x4 == xi(4)})}; % ODEs and path constraints pv = [0.01; 0.005; 0.01; 20; 10; 121.11; 25.56; 121.11]; dx1 = pv(1)*(x2-x1); dx2 = pv(2)*(pv(4)-x2)+pv(3)*u1; dx3 = exp(log(10)/pv(5)*(x1-pv(6))); dx4 = exp(log(10)/pv(7)*(x1-pv(8))); ceq = collocate({ dot(x1) == dx1; dot(x2) == dx2 dot(x3) == dx3; dot(x4) == dx4}); % Objective objective = final(x4)+final((x3-100)^2)+final((x1-40)^2);
Solve the problem
options = struct;
options.name = 'Food Sterilization';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
xopt1 = subs(x1,solution);
xopt2 = subs(x2,solution);
xopt3 = subs(x3,solution);
xopt4 = subs(x4,solution);
uopt1 = subs(u1,solution);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Food Sterilization f_k 280.311099407259460000
sum(|constr|) 0.000000001761330483
f(x_k) + sum(|constr|) 280.311099409020810000
f(x_0) -1200.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 63 ConJacEv 63 Iter 52 MinorIter 308
CPU time: 0.140625 sec. Elapsed time: 0.140000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Food Sterilization f_k 271.918781767461040000
sum(|constr|) 0.000000000005433066
f(x_k) + sum(|constr|) 271.918781767466500000
f(x_0) -11319.688900592708000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 20 ConJacEv 20 Iter 17 MinorIter 139
CPU time: 0.093750 sec. Elapsed time: 0.094000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Food Sterilization f_k 272.292678100737250000
sum(|constr|) 0.000000003270547055
f(x_k) + sum(|constr|) 272.292678104007790000
f(x_0) -11328.081218232532000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 29 ConJacEv 29 Iter 26 MinorIter 203
CPU time: 0.203125 sec. Elapsed time: 0.203000 sec.
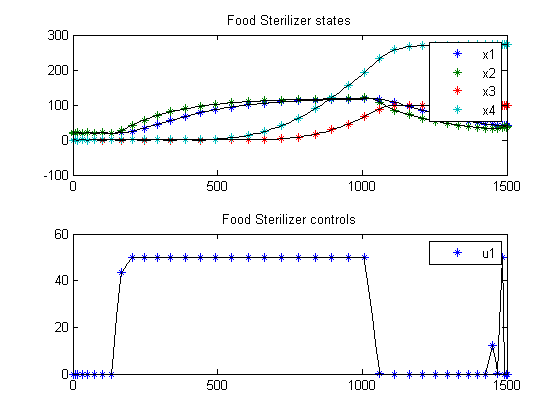
end figure(1) subplot(2,1,1); ezplot([x1; x2; x3; x4]); legend('x1','x2','x3','x4'); title('Food Sterilizer states'); subplot(2,1,2); ezplot(u1); legend('u1'); title('Food Sterilizer controls');