Genetic 2
PROCEEDINGS OF WORLD ACADEMY OF SCIENCE, ENGINEERING AND TECHNOLOGY VOLUME 21 JANUARY 2007 ISSN 1307-6884
Optimal Control Problem, Quasi-Assignment Problem and Genetic Algorithm Omid S. Fard and Akbar H. Borzabadi
See paper for failure of GA toolbox algorithm.
Example 2
Contents
Problem Formulation
Find u over t in [0; 1 ] to minimize

subject to:

The initial condition are:


% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t p = tomPhase('p', t, 0, 1, 50); setPhase(p); tomStates x tomControls u % Initial guess x0 = {icollocate(x == 0.5*t) collocate(u == 0)}; % Boundary constraints cbnd = {initial(x == 0) final(x == 0.5)}; % ODEs and path constraints ceq = collocate(dot(x) == 1/2*x.^2.*sin(x)+u); % Objective objective = integrate(u.^2);
Solve the problem
options = struct;
options.name = 'Genetic 2';
solution = ezsolve(objective, {cbnd, ceq}, x0, options);
t = subs(collocate(t),solution);
x = subs(collocate(x),solution);
u = subs(collocate(u),solution);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Genetic 2 f_k 0.235327080033222360
sum(|constr|) 0.000000001551798634
f(x_k) + sum(|constr|) 0.235327081585021000
f(x_0) 0.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 23 ConJacEv 23 Iter 21 MinorIter 71
CPU time: 0.078125 sec. Elapsed time: 0.078000 sec.
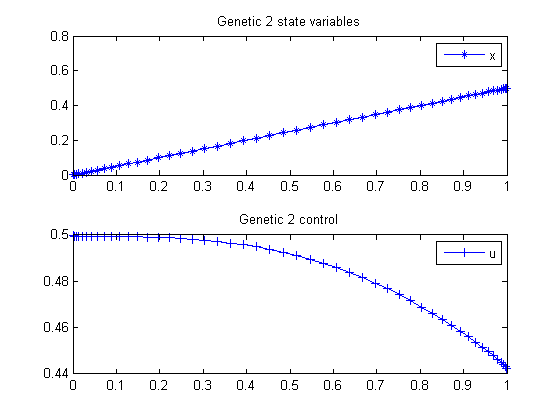
Plot result
subplot(2,1,1) plot(t,x,'*-'); legend('x'); title('Genetic 2 state variables'); subplot(2,1,2) plot(t,u,'+-'); legend('u'); title('Genetic 2 control');