Global Dynamic System
Deterministic Global Optimization of Nonlinear Dynamic Systems, Youdong Lin and Mark A. Stadtherr, Department of Chemical and Biomolecular Engineering, University of Notre Dame
Contents
Problem Description
Find u over t in [0; 1 ] to minimize:

subject to:



% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t p = tomPhase('p', t, 0, 1, 20); setPhase(p); tomStates x tomControls u % Box constraints, bounds and odo c = {-10 <= icollocate(x) <= 10 -5 <= collocate(u) <= 5 initial(x == 9) collocate(dot(x) == -x.^2+u)};
Solve the problem
options = struct; options.name = 'Global Dynamic System'; Prob = sym2prob('con',-final(x)^2, c, [], options); Prob.xInit = 20; Result = tomRun('multiMin', Prob, 1); solution = getSolution(Result); t = subs(collocate(t),solution); x = subs(collocate(x),solution); u = subs(collocate(u),solution);
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Global Dynamic System f_k -8.232621699201864400
sum(|constr|) 0.000000000001350919
f(x_k) + sum(|constr|) -8.232621699200514300
f(x_0) -722.770548126228160000
Solver: multiMin with local solver snopt. EXIT=0. INFORM=1.
Find local optima using multistart local search
Did 20 local tries. Found 2 local minima
FuncEv 31 GradEv 29 ConstrEv 29 ConJacEv 29 Iter 17 MinorIter 103
CPU time: 0.937500 sec. Elapsed time: 0.953000 sec.
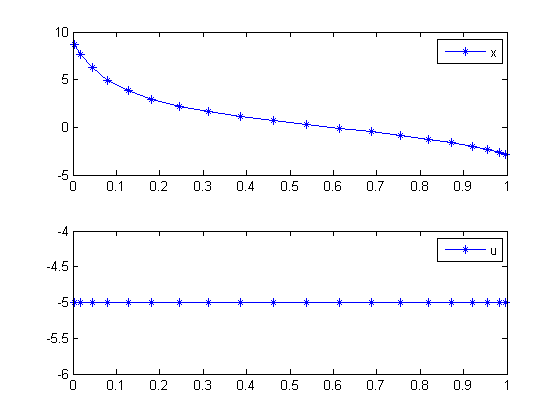
Plot result
figure(1); subplot(2,1,1); plot(t,x,'*-'); legend('x'); subplot(2,1,2); plot(t,u,'*-'); legend('u');