High Dimensional Control
Problem 7: DYNOPT User's Guide version 4.1.0
M. Cizniar, M. Fikar, M. A. Latifi, MATLAB Dynamic Optimisation Code DYNOPT. User's Guide, Technical Report, KIRP FCHPT STU Bratislava, Slovak Republic, 2006.
Contents
Problem description
Find u over t in [0; 0.2 ] to minimize


subject to:







where

![$$ x(0) = [0.1883 \ 0.2507 \ 0.0467 \ 0.0899 \ 0.1804 \ 0.1394 \ 0.1046]' $$](xhighDimControl_eq51974.png)




% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t p = tomPhase('p', t, 0, 0.2, 20); setPhase(p); tomStates x1 x2 x3 x4 x5 x6 x7 tomControls u1 u2 u3 u4 x = [x1; x2; x3; x4; x5; x6; x7]; u = [u1; u2; u3; u4]; x0i = [0.1883;0.2507;0.0467;0.0899;0.1804;0.1394;0.1046]; x0 = icollocate({x1==x0i(1),x2==x0i(2),x3==x0i(3),x4==x0i(4),x5==x0i(5),x6==x0i(6),x7==x0i(7)}); % Box constraints and boundary uL = zeros(4,1); uU = [20;6;4;20]; cbb = {collocate(uL <= u <= uU) initial(x == x0i)}; % ODEs and path constraints q = u(1)+u(2)+u(4); ceq = collocate({ dot(x1) == u4-q.*x1-17.6*x1.*x2-23*x1.*x6.*u3; dot(x2) == u1-q.*x2-17.6*x1.*x2-146*x2.*x3; dot(x3) == u2-q.*x3-73*x2.*x3; dot(x4) == -q.*x4+35.2*x1.*x2-51.3*x4.*x5; dot(x5) == -q.*x5+219*x2.*x3-51.3*x4.*x5; dot(x6) == -q.*x6+102.6*x4.*x5-23*x1.*x6.*u3; dot(x7) == -q.*x7+46*x1.*x6.*u3}); % Objective objective = integrate(-(5.8*(q.*x1-u4)-3.7*u1-4.1*u2+... q.*(23*x4+11*x5+28*x6+35*x7)-5.0*u3.^2-0.099));
Solve the problem
options = struct;
options.name = 'High Dim Control';
solution = ezsolve(objective, {cbb, ceq}, x0, options);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: High Dim Control f_k -21.834326989504241000
sum(|constr|) 0.000000000012388114
f(x_k) + sum(|constr|) -21.834326989491853000
f(x_0) 0.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 101 ConJacEv 101 Iter 99 MinorIter 488
CPU time: 1.109375 sec. Elapsed time: 1.109000 sec.
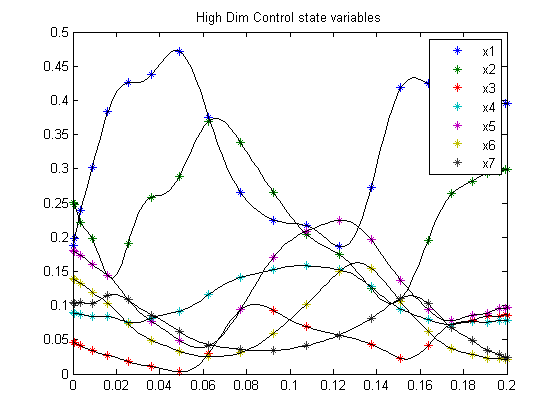
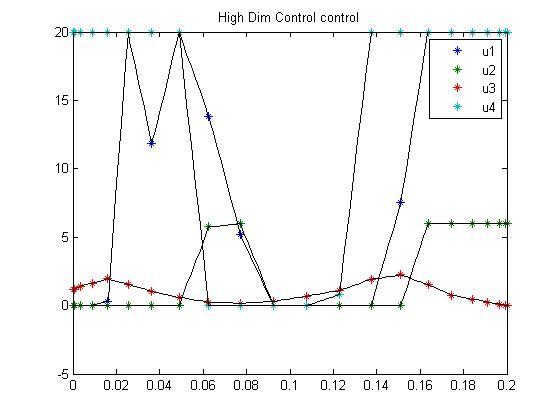
Plot result
figure(1) ezplot(x); legend('x1','x2','x3','x4','x5','x6','x7'); title('High Dim Control state variables'); figure(2) ezplot(u); legend('u1','u2','u3','u4'); title('High Dim Control control');