Lee-Ramirez Bioreactor
Dynamic optimization of chemical and biochemical processes using restricted second-order information 2001, Eva Balsa-Canto, Julio R. Banga, Antonio A. Alonso Vassilios S. Vassiliadis
Case Study II: Lee-Ramirez bioreactor
Contents
Problem description
This problem considers the optimal control of a fed-batch reactor for induced foreign protein production by recombinant bacteria, as presented by Lee and Ramirez (1994) and considered afterwards by Tholudur and Ramirez (1997) and Carrasco and Banga (1998). The objective is to maximize the profitability of the process using the nutrient and the inducer feeding rates as the control variables. Three different values for the ratio of the cost of inducer to the value of the protein production (Q) were considered.
The mathematical formulation, following the modified parameter function set presented by Tholudur and Ramirez (1997) to increase the sensitivity to the controls, is as follows:
Find u1(t) and u2(t) over t in [t0 tf] to maximize:

subject to:












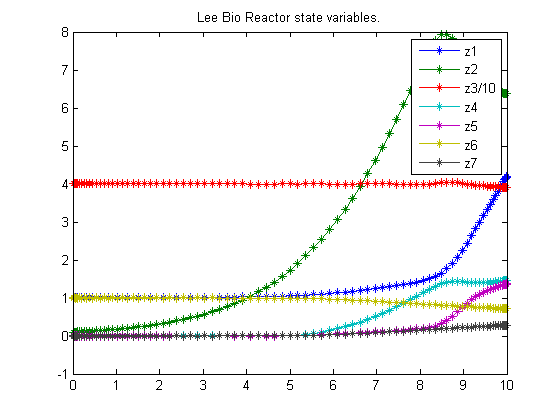
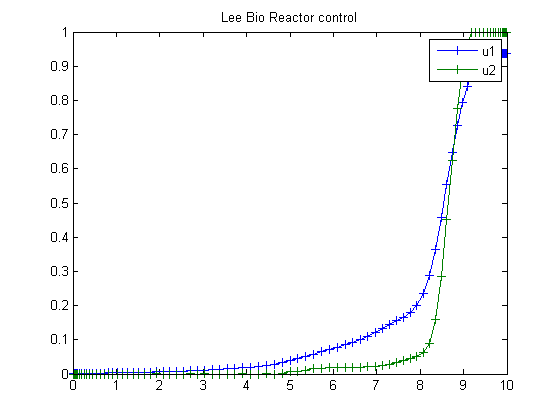
where the state variables are the reactor volume (x1), the cell density (x2), the nutrient concentration (x3), the foreign protein concentration (x4), the inducer concentration (x5), the inducer shock factor on cell growth rate (x6) and the inducer recovery factor on cell growth rate (x7). The two control variables are the glucose rate (u1) and the inducer feeding rate (u2). Q is the ratio of the cost of inducer to the value of the protein production, and the final time is considered fixed as tf = 10 h. The model parameters were described by Lee and Ramirez (1994). The initial conditions are:
![$$ x(t_0) = [1 \ 0.1 \ 40 \ 0 \ 0 \ 1 \ 0]' $$](xleeBioReactor_eq98997.png)
The following constraints on the control variables are considered:


% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t for n=[20 35 55 85]
p = tomPhase('p', t, 0, 10, n); setPhase(p); tomStates z1 z2 z3s z4 z5 z6 z7 % Declaring u as "states" makes it possible to work with their % derivatives. tomStates u1 u2 % Scale z3 by 40 z3 = z3s*40; % Initial guess if n == 20 x0 = {icollocate({z1 == 1; z2 == 0.1 z3 == 40; z4 == 0; z5 == 0 z6 == 1; z7 == 0}) icollocate({u1==t/10; u2==t/10})}; else x0 = {icollocate({z1 == z1opt z2 == z2opt; z3 == z3opt z4 == z4opt; z5 == z5opt z6 == z6opt; z7 == z7opt}) icollocate({u1 == u1opt u2 == u2opt})}; end % Box constraints cbox = {mcollocate({0 <= z1; 0 <= z2 0 <= z3; 0 <= z4; 0 <= z5}) 0 <= collocate(u1) <= 1 0 <= collocate(u2) <= 1}; % Boundary constraints cbnd = initial({z1 == 1; z2 == 0.1 z3 == 40; z4 == 0; z5 == 0 z6 == 1; z7 == 0}); % Various constants and expressions c1 = 100; c2 = 0.51; c3 = 4.0; Q = 0; t1 = 14.35+z3+((z3).^2/111.5); t2 = 0.22+z5; t3 = z6+0.22./t2.*z7; g1 = z3./t1.*(z6+z7*0.22./t2); g2 = 0.233*z3./t1.*((0.0005+z5)./(0.022+z5)); g3 = 0.09*z5./(0.034+z5); % ODEs and path constraints ceq = collocate({ dot(z1) == u1+u2 dot(z2) == g1.*z2-(u1+u2).*z2./z1 dot(z3) == u1./z1.*c1-(u1+u2).*z3./z1-g1.*z2/c2 dot(z4) == g2.*z2-(u1+u2).*z4./z1 dot(z5) == u2*c3./z1-(u1+u2).*z5./z1 dot(z6) == -g3.*z6 dot(z7) == g3.*(1-z7)}); % Objective J = -final(z1)*final(z4)+Q*integrate(u2); damp = 0.1/n; % penalty term to yield a smoother u. objective = J + damp*integrate(dot(u1)^2+dot(u2)^2);
Solve the problem
options = struct;
options.name = 'Lee Bio Reactor';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
% Optimal z, u for starting point
z1opt = subs(z1, solution);
z2opt = subs(z2, solution);
z3opt = subs(z3, solution);
z4opt = subs(z4, solution);
z5opt = subs(z5, solution);
z6opt = subs(z6, solution);
z7opt = subs(z7, solution);
u1opt = subs(u1, solution);
u2opt = subs(u2, solution);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Lee Bio Reactor f_k -6.158549893842515400
sum(|constr|) 0.000001696596070549
f(x_k) + sum(|constr|) -6.158548197246444600
f(x_0) 0.000999999999999945
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 688 ConJacEv 688 Iter 529 MinorIter 3450
CPU time: 6.609375 sec. Elapsed time: 6.750000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Lee Bio Reactor f_k -6.149281026758400200
sum(|constr|) 0.000000113027662584
f(x_k) + sum(|constr|) -6.149280913730737400
f(x_0) -6.161231516476529900
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 512 ConJacEv 512 Iter 462 MinorIter 1514
CPU time: 12.765625 sec. Elapsed time: 13.031000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Lee Bio Reactor f_k -6.148471246836187700
sum(|constr|) 0.000003449359665746
f(x_k) + sum(|constr|) -6.148467797476522300
f(x_0) -6.151340399353863100
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 263 ConJacEv 263 Iter 232 MinorIter 1318
CPU time: 20.609375 sec. Elapsed time: 20.906000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Lee Bio Reactor f_k -6.149330995342836600
sum(|constr|) 0.000001492539524976
f(x_k) + sum(|constr|) -6.149329502803311700
f(x_0) -6.149416170638048100
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 912 ConJacEv 912 Iter 818 MinorIter 3515
CPU time: 299.031250 sec. Elapsed time: 304.265000 sec.
end
t = subs(collocate(t),solution);
z1 = subs(collocate(z1),solution);
z2 = subs(collocate(z2),solution);
z3 = subs(collocate(z3),solution);
z4 = subs(collocate(z4),solution);
z5 = subs(collocate(z5),solution);
z6 = subs(collocate(z6),solution);
z7 = subs(collocate(z7),solution);
u1 = subs(collocate(u1),solution);
u2 = subs(collocate(u2),solution);
Plot result
figure(1) plot(t,z1,'*-',t,z2,'*-',t,z3/10,'*-',t,z4,'*-' ... ,t,z5,'*-',t,z6,'*-',t,z7,'*-'); legend('z1','z2','z3/10','z4','z5','z6','z7'); title('Lee Bio Reactor state variables.'); figure(2) plot(t,u1,'+-',t,u2,'+-'); legend('u1','u2'); title('Lee Bio Reactor control'); disp('J = '); disp(subs(J,solution));
J = -6.1510