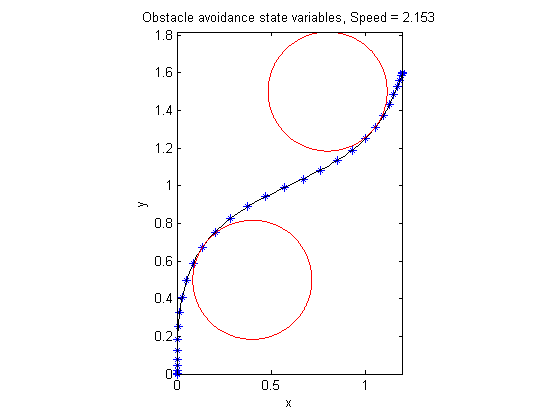
Obstacle Avoidance
OPTRAGEN 1.0 A MATLAB Toolbox for Optimal Trajectory Generation, Raktim Bhattacharya, Texas A&M University (Note: There is typographical error in the OPTRAGEN documentation. The objective involves second derivatives of x and y.)
A robot with obstacles in 2D space. Travel from point A to B using minimum energy.
Contents
Problem Formulation
Find theta(t) and V over t in [0; 1 ] to minimize
subject to:
![$$ [x_0 \ y_0] = [0 \ 0] $$](xobstacleAvoidance_eq91290.png)
![$$ [x_1 \ y_1] = [1.2 \ 1.6] $$](xobstacleAvoidance_eq47017.png)


Where V is a constant scalar speed.
% Copyright (c) 2007-2008 by Tomlab Optimization Inc. clear pi % 3.14159... unless someone has set it to something else! toms t V tf = 1; % final time % Starting guess speed = 5; xopt = 1.2*t; yopt = 1.6*t; vxopt = 1.2; vyopt = 1.6; thetaopt = pi/4;
Solve the problem, using a successively larger number collocation points
for n=[4 15 30]
% Create a new phase and states, using n collocation points p = tomPhase('p', t, 0, tf, n); setPhase(p); tomStates x y vx vy tomControls theta % Interpolate an initial guess for the n collocation points x0 = {V == speed icollocate({x == xopt; y == yopt; vx == vxopt; vy == vyopt}) collocate(theta == thetaopt)}; % Box constraints cbox = {0 <= V <= 100 }; % Boundary constraints cbnd = {initial({x == 0; y == 0}) final({x == 1.2; y == 1.6})}; % ODEs and path constraints ode = collocate({ dot(x) == vx == V*cos(theta) dot(y) == vy == V*sin(theta) }); % A 30th order polynomial is more than sufficient to give good % accuracy. However, that means that mcollocate would only check % about 60 points. In order to make sure we don't hit an obstacle, % we check 300 evenly spaced points instead, using atPoints. obstacles = atPoints(linspace(0,tf,300), { (x-0.4)^2 + (y-0.5)^2 >= 0.1 (x-0.8)^2 + (y-1.5)^2 >= 0.1}); % Objective: minimum energy. objective = integrate(dot(vx)^2+dot(vy)^2);
Solve the problem
options = struct;
options.name = 'Obstacle avoidance';
constr = {cbox, cbnd, ode, obstacles};
solution = ezsolve(objective, constr, x0, options);
% Optimal x, y, and speed, to use as starting guess in the next iteration
xopt = subs(x, solution);
yopt = subs(y, solution);
vxopt = subs(vx, solution);
vyopt = subs(vy, solution);
thetaopt = subs(theta, solution);
speed = subs(V,solution);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Obstacle avoidance f_k 29.812856165009947000
sum(|constr|) 0.000000001309307815
f(x_k) + sum(|constr|) 29.812856166319254000
f(x_0) 0.000000000000062528
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 22 ConJacEv 22 Iter 20 MinorIter 2732
CPU time: 0.625000 sec. Elapsed time: 0.672000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Obstacle avoidance f_k 22.128728366249842000
sum(|constr|) 0.000000000006805542
f(x_k) + sum(|constr|) 22.128728366256649000
f(x_0) 29.812856165009237000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 151 ConJacEv 151 Iter 136 MinorIter 480
CPU time: 2.296875 sec. Elapsed time: 2.344000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Obstacle avoidance f_k 22.091923326555573000
sum(|constr|) 0.000000000010556925
f(x_k) + sum(|constr|) 22.091923326566132000
f(x_0) 22.128728366252837000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 322 ConJacEv 322 Iter 293 MinorIter 697
CPU time: 9.671875 sec. Elapsed time: 9.734000 sec.
end
Plot result
figure(1) th = linspace(0,2*pi,500); x1 = sqrt(0.1)*cos(th)+0.4; y1 = sqrt(0.1)*sin(th)+0.5; x2 = sqrt(0.1)*cos(th)+0.8; y2 = sqrt(0.1)*sin(th)+1.5; ezplot(x,y); hold on plot(x1,y1,'r',x2,y2,'r'); hold off xlabel('x'); ylabel('y'); title(sprintf('Obstacle avoidance state variables, Speed = %2.4g',speed)); axis image