Time-optimal Trajectories for Robot Manipulators
Users Guide for dyn.Opt, Example 2
Dissanayake, M., Goh, C. J., & Phan-Thien, N., Time-optimal Trajectories for Robot Manipulators, Robotica, Vol. 9, pp. 131-138, 1991.
Contents
Problem Formulation
Find u over t in [0; tF ] to minimize

subject to:
![$$ x(0) = [0 \ -2 \ 0 \ 0] $$](xrobotManipulators_eq88963.png)
![$$ x(t_F) = [1 \ -1 \ 0 \ 0] $$](xrobotManipulators_eq18412.png)



















% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t toms tf tfopt = 7; x1opt = 1*t/tf; x2opt = -2+1*t/tf; x3opt = 2; x4opt = 4; u1opt = 10-20*t/tf; u2opt = -10+20*t/tf;
Solve the problem, using a successively larger number collocation points
for n=[30 60]
p = tomPhase('p', t, 0, tf, n); setPhase(p); tomStates x1 x2 x3 x4 tomControls u1 u2 % Initial guess x0 = {tf == tfopt icollocate({ x1 == x1opt x2 == x2opt x3 == x3opt x4 == x4opt}) collocate({ u1 == u1opt u2 == u2opt})}; % Box constraints cbox = { 0.1 <= tf <= 50 -10 <= collocate(u1) <= 10 -10 <= collocate(u2) <= 10}; % Boundary constraints cbnd = {initial({x1 == 0; x2 == -2 x3 == 0; x4 == 0}) final({x1 == 1; x2 == -1 x3 == 0; x4 == 0})}; % ODEs and path constraints L_1 = 0.4; L_2 = 0.4; m_1 = 0.5; m_2 = 0.5; Eye_1 = 0.1; Eye_2 = 0.1; el_1 = 0.2; el_2 = 0.2; cs1 = cos(x2); H_11 = Eye_1 + Eye_2 + m_1*el_1^2+ ... m_2*(L_1^2+el_2^2+2.0*L_1*el_2*cs1); H_12 = Eye_2 + m_2*el_2^2 + m_2*L_1*el_2*cs1; H_22 = Eye_2 + m_2*el_2^2; h = m_2*L_1*el_2*sin(x2); delta = 1.0./(H_11.*H_22-H_12.^2); ceq = collocate({ dot(x1) == x3 dot(x2) == x4 dot(x3) == delta.*(2.0*h.*H_22.*x3.*x4 ... +h.*H_22.*x4.^2+h.*H_12.*x3.^2+H_22.*u1-H_12.*u2) dot(x4) == delta.*(-2.0*h.*H_12.*x3.*x4 ... -h.*H_11.*x3.^2-h.*H_12.*x4.^2+H_11.*u2-H_12.*u1)}); % Objective objective = tf;
Solve the problem
options = struct;
options.name = 'Robot Manipulators';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
% Optimal x, y, and speed, to use as starting guess
% in the next iteration
tfopt = subs(final(t), solution);
x1opt = subs(x1, solution);
x2opt = subs(x2, solution);
x3opt = subs(x3, solution);
x4opt = subs(x4, solution);
u1opt = subs(u1, solution);
u2opt = subs(u2, solution);
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Robot Manipulators f_k 0.391698225312772320
sum(|constr|) 0.000156851954993457
f(x_k) + sum(|constr|) 0.391855077267765750
f(x_0) 7.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 51 ConJacEv 51 Iter 25 MinorIter 280
CPU time: 0.312500 sec. Elapsed time: 0.328000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Robot Manipulators f_k 0.391820155673056890
sum(|constr|) 0.000000000019002159
f(x_k) + sum(|constr|) 0.391820155692059020
f(x_0) 0.391698225312772320
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 16 ConJacEv 16 Iter 12 MinorIter 438
CPU time: 0.500000 sec. Elapsed time: 0.515000 sec.
end
t = subs(collocate(t),solution);
x1 = subs(collocate(x1opt),solution);
x2 = subs(collocate(x2opt),solution);
x3 = subs(collocate(x3opt),solution);
x4 = subs(collocate(x4opt),solution);
u1 = subs(collocate(u1opt),solution);
u2 = subs(collocate(u2opt),solution);
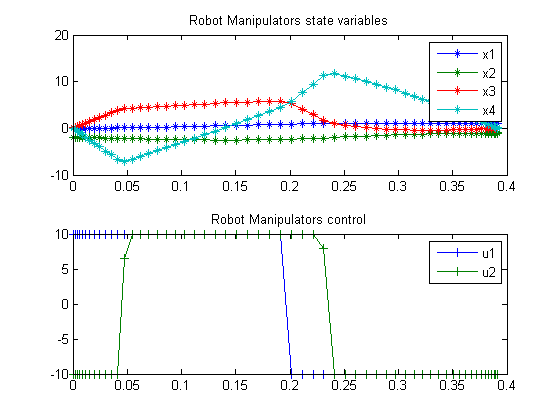
Plot result
subplot(2,1,1) plot(t,x1,'*-',t,x2,'*-',t,x3,'*-',t,x4,'*-'); legend('x1','x2','x3','x4'); title('Robot Manipulators state variables'); subplot(2,1,2) plot(t,u1,'+-',t,u2,'+-'); legend('u1','u2'); title('Robot Manipulators control');