Satellite Control
Users Guide for dyn.Opt, Example 7a, 7b, 7c
Contents
A satellite control problem
Find T (controls) over t in [0; 100 ] to minimize
7c is free end time
7a:


7b:

7c:

subject to:













![$$ e(0) = [0 \ 0 \ 0 \ 1] $$](xsatelliteControl_eq19099.png)
![$$ w(0) = [0.01 \ 0.005 \ 0.001] $$](xsatelliteControl_eq09469.png)
7b, 7c - x(100) = [0.70106 0.0923 0.56098 NaN 0 0 0]; 7c - free time 7c - -1 <= T <= 1
% Copyright (c) 2007-2008 by Tomlab Optimization Inc.
Problem setup
toms t % Starting guess e1opt = 0; e2opt = 0; e3opt = 0; e4opt = 0; w1opt = 0; w2opt = 0; w3opt = 0; T1opt = 0; T2opt = 0; T3opt = 0; % Final times tfs = zeros(3,1); for i=1:3 if i == 3 toms tf runs = [10 20 101]; else runs = [10 40]; end if i == 2 e1opt = 0; e2opt = 0; e3opt = 0; e4opt = 0; w1opt = 0; w2opt = 0; w3opt = 0; T1opt = 0; T2opt = 0; T3opt = 0; end for n=runs
if i == 3 p = tomPhase('p', t, 0, tf, n); else p = tomPhase('p', t, 0, 100, n); end setPhase(p); tomStates e1 e2 e3 e4 w1 w2 w3 tomControls T1 T2 T3 if i == 3 x0 = {tf == 100}; else x0 = {}; end % Initial guess x0 = {x0; collocate({T1 == T1opt T2 == T2opt; T3 == T3opt}) icollocate({ e1 == e1opt; e2 == e2opt e3 == e3opt; e4 == e4opt w1 == w1opt; w2 == w2opt w3 == w3opt})}; if i == 3 cbox = { 1 <= tf <= 1000 -1 <= collocate(T1) <= 1 -1 <= collocate(T2) <= 1 -1 <= collocate(T3) <= 1}; else cbox = {}; end % Boundary constraints cbnd = initial({e1 == 0 e2 == 0; e3 == 0 e4 == 1; w1 == 0.01 w2 == 0.005; w3 == 0.001});
Problem 7b and 7c modifications
if i ~= 1 cbnd = {cbnd final({ e1 == 0.70106 e2 == 0.0923 e3 == 0.56098 w1 == 0 w2 == 0 w3 == 0 })}; end % ODEs and path constraints I1 = 1.0e6; I2 = 833333.0; I3 = 916667.0; T1S = 550; T2S = 50; T3S = 550; ceq = collocate({ dot(e1) == 0.5*(w1.*e4-w2.*e3+w3.*e2) dot(e2) == 0.5*(w1.*e3+w2.*e4-w3.*e1) dot(e3) == 0.5*(-w1.*e2+w2.*e1+w3.*e4) dot(e4) == -0.5*(w1.*e1+w2.*e2+w3.*e3) dot(w1) == ((I2-I3)*w2.*w3+T1*T1S)/I1 dot(w2) == ((I3-I1)*w3.*w1+T2*T2S)/I2 dot(w3) == ((I1-I2)*w1.*w2+T3*T3S)/I3}); % Objective if i == 1 objective = final(w1)^2 + final(w2)^2 + final(w3)^2 +... (final(e1) - 0.70106)^2 + (final(e2) - 0.0923)^2 + ... (final(e3) - 0.56098)^2 + (final(e4) - 0.43047)^2 ... + integrate((T1.^2+T2.^2+T3.^2)*0.5); elseif i == 2 objective = integrate((T1.^2+T2.^2+T3.^2)*0.5); else objective = tf; end
Solve the problem
options = struct;
if i == 1
options.name = 'Satellite Control 7a';
elseif i == 2
options.name = 'Satellite Control 7b';
else
options.name = 'Satellite Control 7c';
end
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
e1opt = subs(e1, solution);
e2opt = subs(e2, solution);
e3opt = subs(e3, solution);
e4opt = subs(e4, solution);
w1opt = subs(w1, solution);
w2opt = subs(w2, solution);
w3opt = subs(w3, solution);
T1opt = subs(T1, solution);
T2opt = subs(T2, solution);
T3opt = subs(T3, solution);
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7a f_k 0.463944669252504550
sum(|constr|) 0.000000135115457319
f(x_k) + sum(|constr|) 0.463944804367961870
f(x_0) 0.139185999999999230
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 27 ConJacEv 27 Iter 15 MinorIter 105
CPU time: 0.109375 sec. Elapsed time: 0.125000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7a f_k 0.463944366974704090
sum(|constr|) 0.000000000342698366
f(x_k) + sum(|constr|) 0.463944367317402460
f(x_0) -0.536077645550793400
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 3 ConJacEv 3 Iter 2 MinorIter 89
CPU time: 0.171875 sec. Elapsed time: 0.172000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7b f_k 71.411903807059261000
sum(|constr|) 0.000000066784327430
f(x_k) + sum(|constr|) 71.411903873843585000
f(x_0) 0.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 20 ConJacEv 20 Iter 17 MinorIter 205
CPU time: 0.109375 sec. Elapsed time: 0.109000 sec.
Problem type appears to be: qpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7b f_k 71.411584008717440000
sum(|constr|) 0.000000016456711387
f(x_k) + sum(|constr|) 71.411584025174150000
f(x_0) 71.236662445283258000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 5 ConJacEv 5 Iter 3 MinorIter 350
CPU time: 0.390625 sec. Elapsed time: 0.391000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 99.185340224824486000
sum(|constr|) 0.000000000397831665
f(x_k) + sum(|constr|) 99.185340225222319000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 10 ConJacEv 10 Iter 8 MinorIter 96
CPU time: 0.078125 sec. Elapsed time: 0.078000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 98.945461991023606000
sum(|constr|) 0.000017742910587798
f(x_k) + sum(|constr|) 98.945479733934192000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 5 ConJacEv 5 Iter 4 MinorIter 155
CPU time: 0.109375 sec. Elapsed time: 0.109000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 98.834204968061897000
sum(|constr|) 0.000012503593125482
f(x_k) + sum(|constr|) 98.834217471655023000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 7 ConJacEv 7 Iter 6 MinorIter 972
CPU time: 7.906250 sec. Elapsed time: 8.016000 sec.
end tfs(i) = subs(final(t),solution); % We only want to plot the solution from the first problem if i == 1 tp = subs(collocate(t),solution); e1p = subs(collocate(e1),solution); e2p = subs(collocate(e2),solution); e3p = subs(collocate(e3),solution); e4p = subs(collocate(e4),solution); w1p = subs(collocate(w1),solution); w2p = subs(collocate(w2),solution); w3p = subs(collocate(w3),solution); T1p = subs(collocate(T1),solution); T2p = subs(collocate(T2),solution); T3p = subs(collocate(T3),solution); end end disp(sprintf('\nFinal time for 7a = %1.4g',tfs(1))); disp(sprintf('\nFinal time for 7b = %1.4g',tfs(2))); disp(sprintf('\nFinal time for 7c = %1.4g',tfs(3)));
Final time for 7a = 100 Final time for 7b = 100 Final time for 7c = 98.83
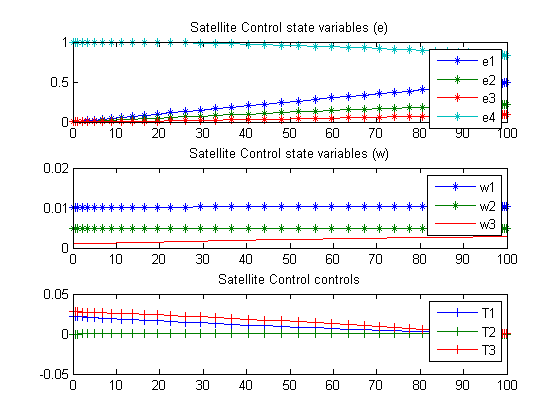
Plot result
subplot(3,1,1) plot(tp,e1p,'*-',tp,e2p,'*-',tp,e3p,'*-',tp,e4p,'*-'); legend('e1','e2','e3','e4'); title('Satellite Control state variables (e)'); subplot(3,1,2) plot(tp,w1p,'*-',tp,w2p,'*-',tp,w3p); legend('w1','w2','w3'); title('Satellite Control state variables (w)'); subplot(3,1,3) plot(tp,T1p,'+-',tp,T2p,'+-',tp,T3p,'+-'); legend('T1','T2','T3'); title('Satellite Control controls');