Zermelos problem (version 2)
Contents
Problem description
Time-optimal crossing by boat of a river with a position dependent current stream.
Applied Optimal Control, Bryson & Ho, 1975. Example 1 on page 77.
Programmers: Gerard Van Willigenburg (Wageningen University) Willem De Koning (retired from Delft University of Technology)
% Copyright (c) 2009-2009 by Tomlab Optimization Inc.
Problem setup
% Array with consecutive number of collocation points narr = [20 40]; toms t tf % Free final time for n=narr
p = tomPhase('p', t, 0, tf, n); setPhase(p) tomStates x1 x2 tomControls u1 % Initial & terminal states xi = [0; 0]; xf = [31; 0]; % Initial guess if n==narr(1) x0 = {tf == 2; icollocate({x1 == xi(1); x2 == xi(2)}) collocate({u1 == 0})}; else x0 = {tf == tfopt; icollocate({x1 == xopt1; x2 == xopt2}) collocate({u1 == uopt1})}; end % Box constraints cbox = {1 <= tf <= 10}; % Boundary constraints cbnd = {initial({x1 == xi(1); x2 == xi(2)}); final({x1 == xf(1); x2 == xf(2)})}; % ODEs and path constraints v = 9; % No water motion in x1 direction dx1 = v*cos(u1); % Water motion in x2 direction: 5*sin(pi*x1/31) dx2 = v*sin(u1)+5*sin(pi*x1/31); ceq = collocate({ dot(x1) == dx1 dot(x2) == dx2}); % Objective objective = tf;
Solve the problem
options = struct;
options.name = 'Ferry trajectory optimization';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
tfopt = subs(tf,solution);
xopt1 = subs(x1,solution);
xopt2 = subs(x2,solution);
uopt1 = subs(u1,solution);
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Ferry trajectory optimization f_k 3.681324200251761000
sum(|constr|) 0.000024237038659655
f(x_k) + sum(|constr|) 3.681348437290420600
f(x_0) 2.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 91 ConJacEv 91 Iter 54 MinorIter 110
CPU time: 0.156250 sec. Elapsed time: 0.172000 sec.
Problem type appears to be: lpcon
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2010-02-05
=====================================================================================
Problem: --- 1: Ferry trajectory optimization f_k 3.681324335382778000
sum(|constr|) 0.000002528802798087
f(x_k) + sum(|constr|) 3.681326864185576300
f(x_0) 3.681324200251761000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 40 ConJacEv 40 Iter 32 MinorIter 114
CPU time: 0.171875 sec. Elapsed time: 0.172000 sec.
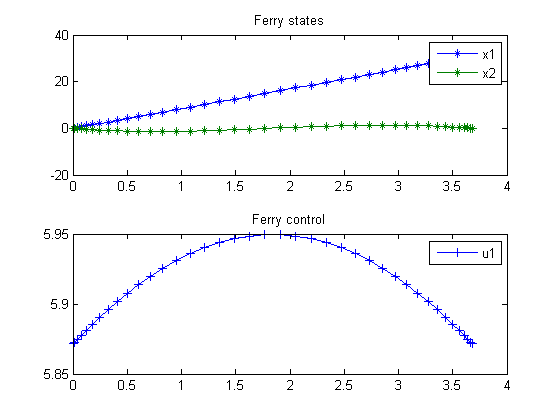
end % Get solution t = subs(collocate(t),solution); x1 = subs(collocate(x1),solution); x2 = subs(collocate(x2),solution); u1 = subs(collocate(u1),solution); %Bound u1 to [0,2pi] u1 = rem(u1,2*pi); u1 = (u1<0)*2*pi+u1; % Plot final solution figure(1) subplot(2,1,1) plot(t,x1,'*-',t,x2,'*-'); legend('x1','x2'); title('Ferry states'); subplot(2,1,2) plot(t,u1,'+-'); legend('u1'); title('Ferry control');